W1: Components of a Model
CS300b – Agent Modeling
The Basic Model Setup
- Agents and Environment:
- Agents: Individuals or households residing on a grid
- Environment: The grid represents a city or neighborhood
- Key Parameters:
- Population density (p): Proportion of grid cells occupied by agents
- Similarity threshold (S): Minimum proportion of similar neighbors required for an agent to be “happy”
Agent Behavior: The Rules of the Game
- The Happiness Rule: Agents assess their satisfaction based on the similarity threshold.
- Unhappy Agents Move: Unhappy agents relocate to empty cells where they can meet their similarity threshold.
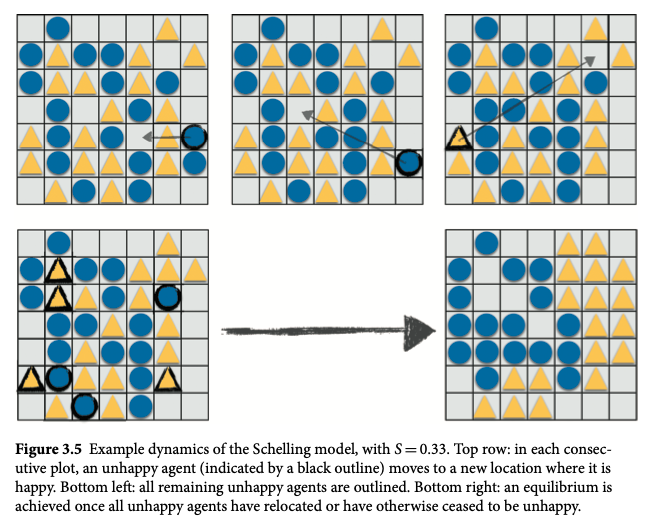
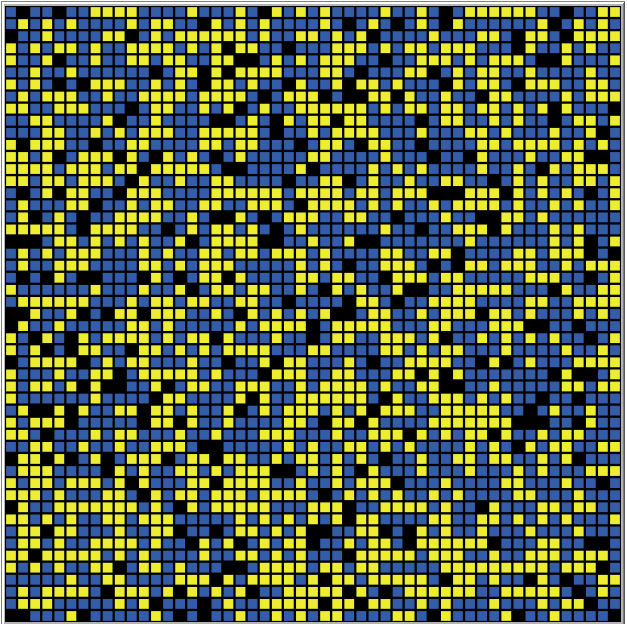
Emergence of Segregation: Micromotives, Macrobehavior
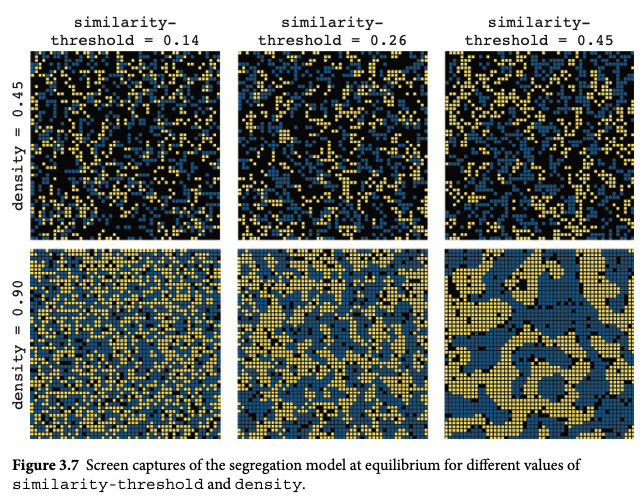
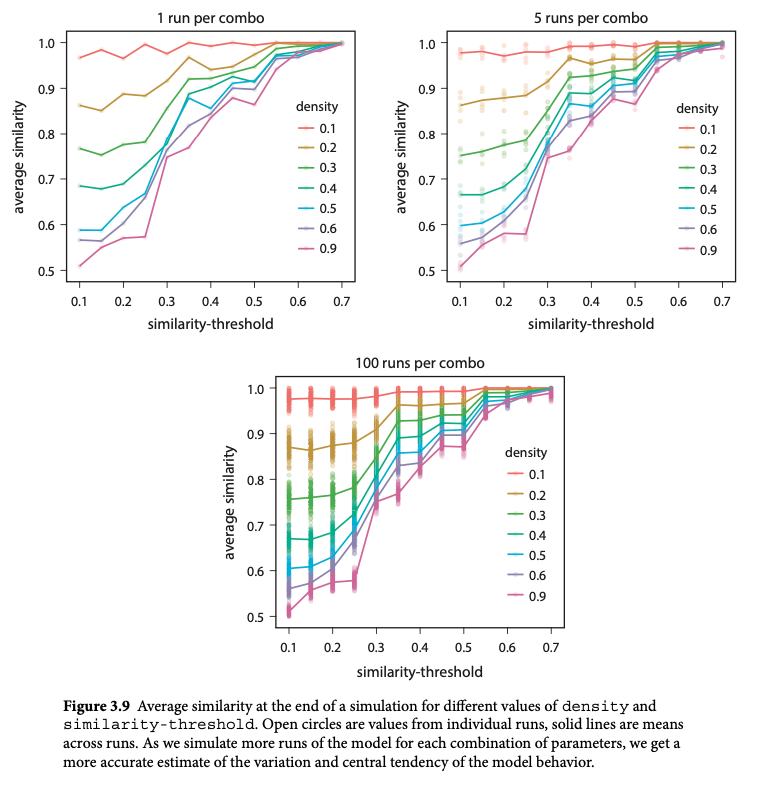
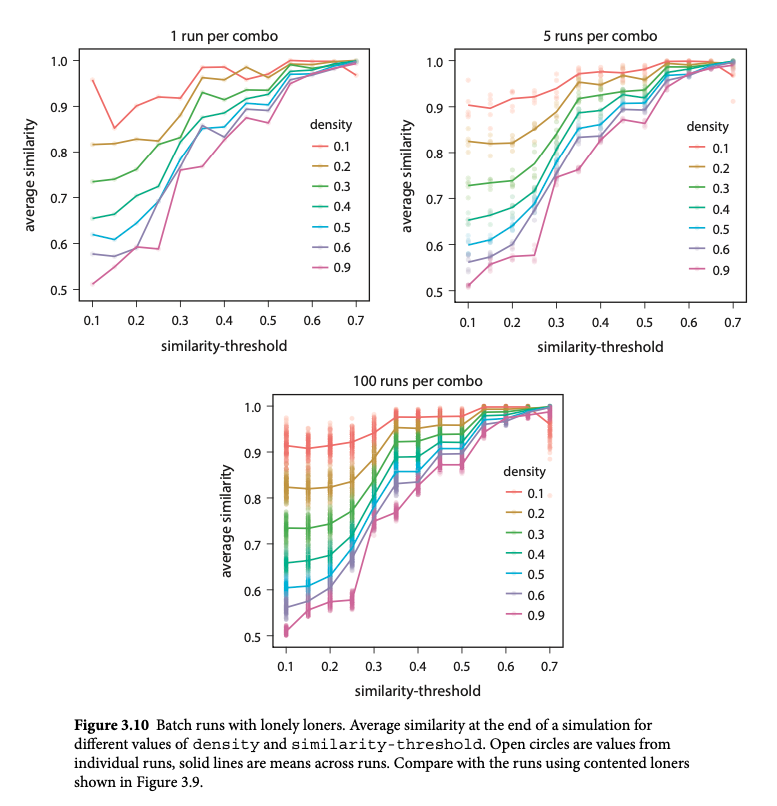
Snapshots of the model at equilibrium for different similarity thresholds and densities
Batch Run Results and Interpretation